Faster Than Real-Time Tsunami Simulations
A Use Case by ![]()
Short description
Results & Achievements
Objectives
Technologies
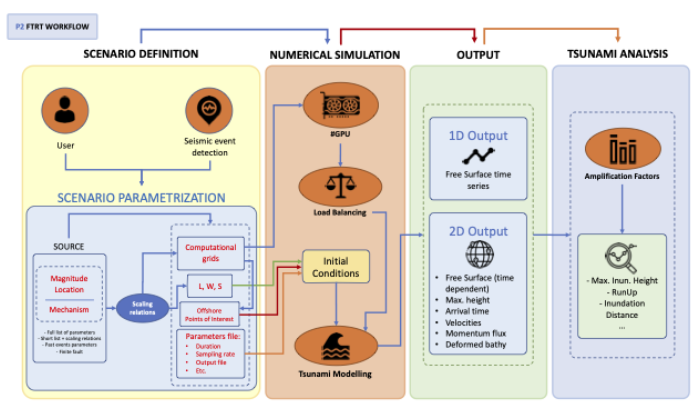
Workflow
The Faster-Than-Real-Time (FTRT) prototype for extremely fast and robust tsunami simulations is based upon GPU/multi-GPU (NVIDIA) architectures and is able to use earthquake information from different locations and with heterogeneous content (full Okada parameter set, hypocenter and magnitude plus Wells and Coppersmith (1994)). Using these inhomogeneous inputs, and according to the FTRT workflow (see Fig. 1), tsunami computations are launched for a single scenario or a set of related scenarios for the same event. Basically, the automated retrieval of earthquake information is sent to the system and on-the-fly simulations are automatically launched. Therefore, several scenarios are computed at the same time. As updated information about the source is provided, new simulations should be launched. As output, several options are available tailored to the end-user needs, selecting among: sea surface height and its maximum, simulated isochrones and arrival times to the coastal areas, estimated tsunami coastal wave height, times series at Points of Interest (POIs) and oceanographic sensors.
A first successful implementation has been done for the Emergency Response Coordination Centre (ERCC), a service provided by the ARISTOTLE-ENHSP Project. The system implemented for ARISTOTLE follows the general workflow presented in Figure 1. Currently, in this system, a single source is used to assess the hazard and the computational grids are predefined. The computed wall-clock time is provided for each experiment and the outputs of the simulation are maximum water height and arrival times on the whole domain, and water height time-series on a set of selected POIs, predefined for each domain.
A library of Python codes are used to generate the input data required to run HySEA codes and to extract the topo-bathymetric data and construct the grids used by HySEA codes.
Software involved
Tsunami-HySEA has been successfully tested with the following tools and versions:
Compilers: GNU C++ compiler 7.3.0 or 8.4.0, OpenMPI 4.0.1, Spectrum MPI 10.3.1, CUDA 10.1 or 10.2
Management tools: CMake 3.9.6 or 3.11.4
External/third party libraries: NetCDF 4.6.1 or 4.7.3, PnetCDF 1.11.2 or 1.12.0
Pre-processing:
Nesting mesh generation tools.
In-house developed python tools for pre-processing purposes.
Visualization tools:
In-house developed python tools.
Collaborating Institutions
UMA, INGV, NGI, IGN, PMEL/NOAA (with a role in pilot’s development).
Other institutions benefiting from use case results with which we collaborate:
IEO, IHC, IGME, IHM, CSIC, CCS, Junta de Andalucía (all Spain); Italian Civil Protection, Seismic network of Puerto Rico (US), SINAMOT (Costa Rica), SHOA and UTFSM (Chile), GEUS (Denmark), JRC (EC), University of Malta, INCOIS (India), SGN (Dominican Republic), UNESCO, NCEI/NOAA (US), ICG/NEAMTWS, ICG/CARIBE-EWS, among others.